
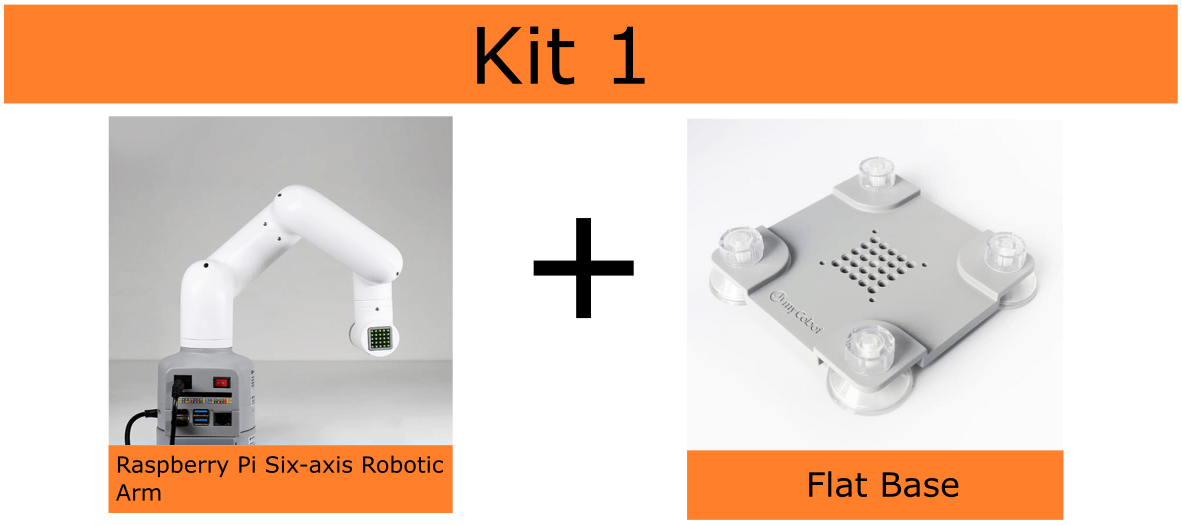
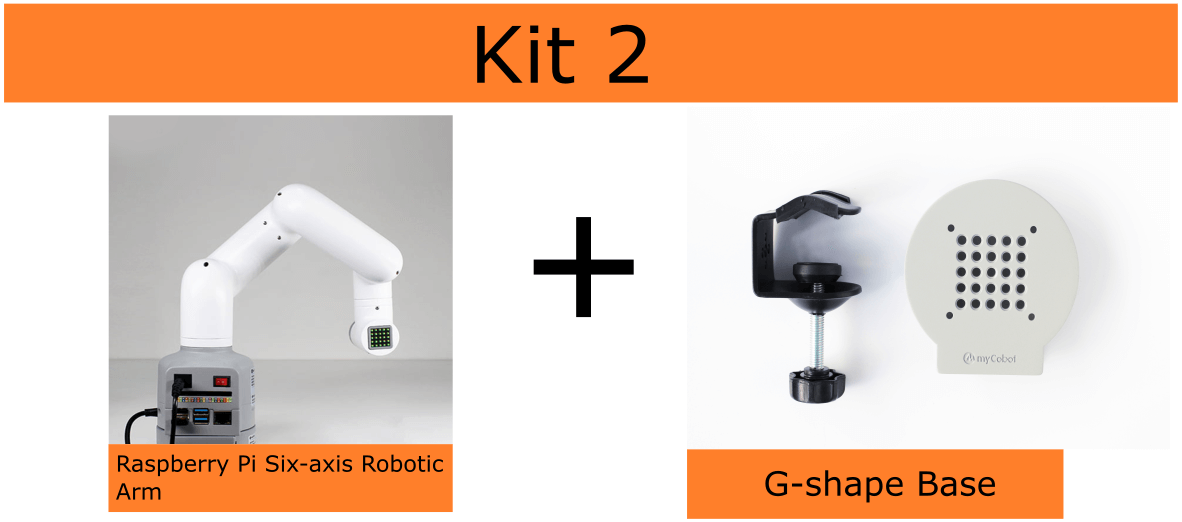
This kit includes Six-axis Robotic Arm (Based on a Raspberry Pi) and Flat Base. If you need G-Shape Base, please click the image of Kit 2.
Introduction of Robotic Arm
This robotic arm will definitely lead you to a wonderful robot programming world!
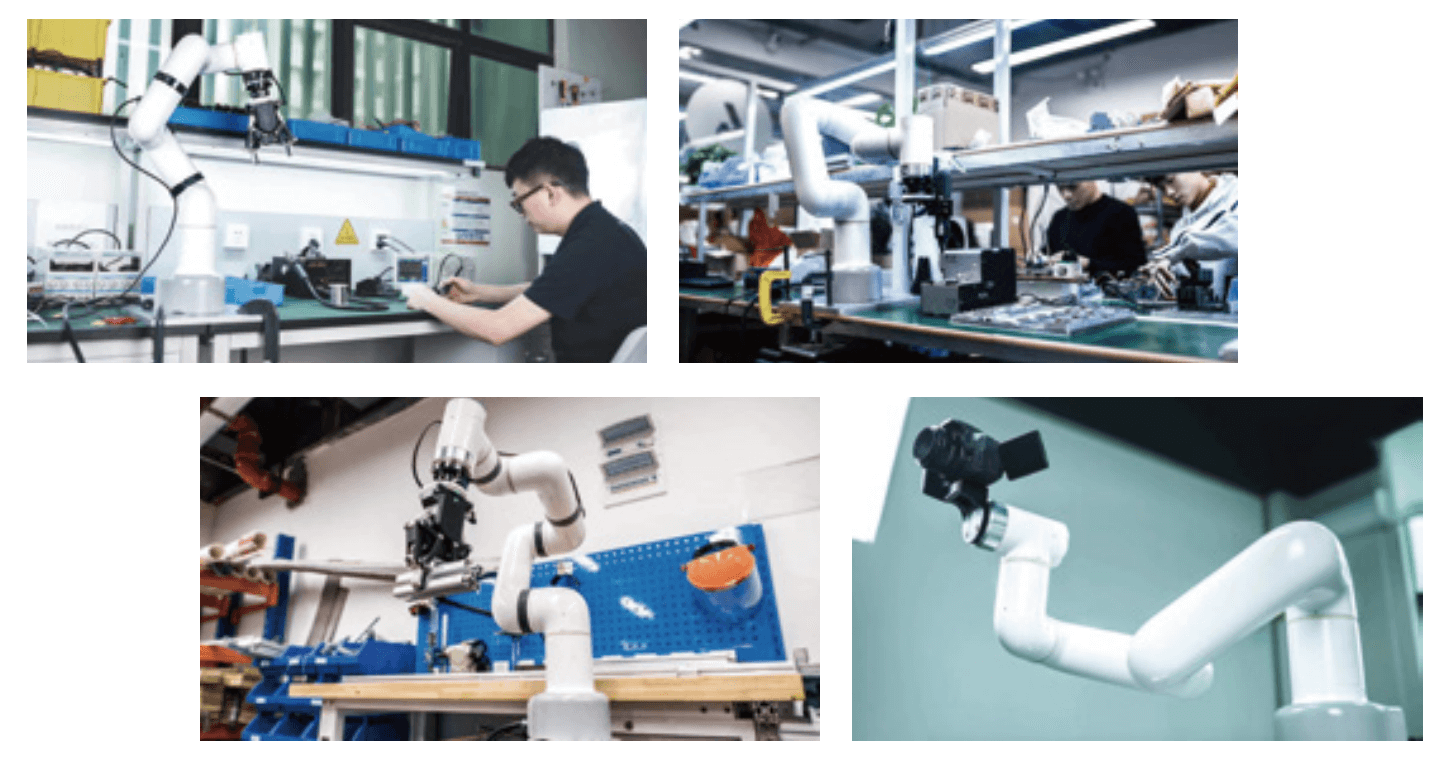
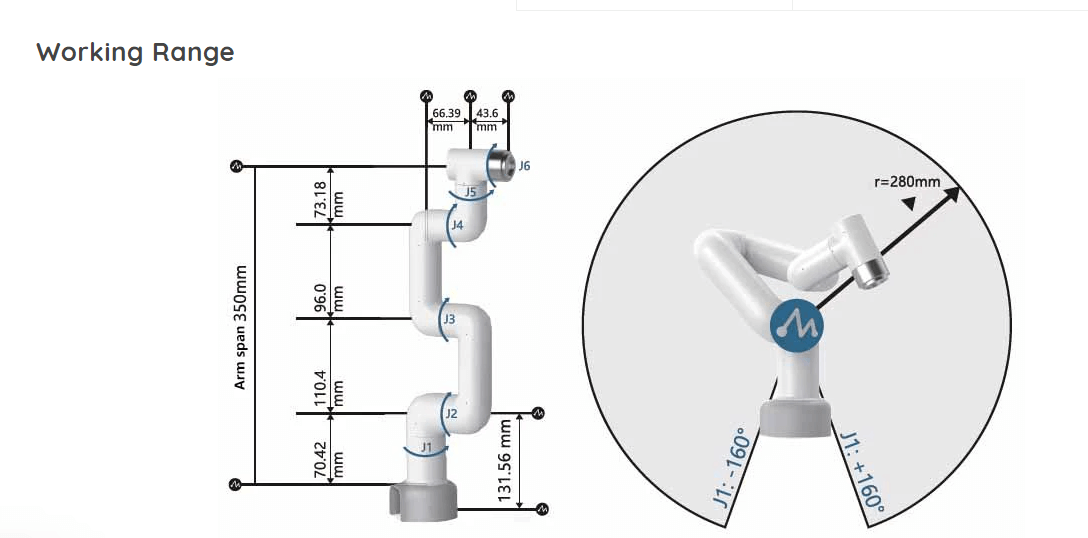
Based on a Raspberry Pi microprocessor and built-in Ubuntu system, this small but powerful Raspberry Pi Six-axis Robotic Arm comes with a working range of 280mm and supports multi-platform secondary development. It runs independently without a PC and quickly creates a perfect programming environment for robotic algorithm developing, ROS simulation, etc. Just connecting it to peripherals, then users can use it for scientific research and teaching, smart home, light industry, or other commercial applications.
It consists of Raspberry Pi native hardware interfaces(4 USB, 2 HDMI, and standard GPIOs), tens of end effectors, terminal LEGO pins with various sensors, color visual tracking, QR code & gesture recognition, voice broadcast, etc.

And it supports multiple coding languages such as c++, c#, Python, or graphic programming software like myBlockly and Mind+.

Besides, the compact all-in-one design makes it convenient to carry, easy to disassemble and replace, and plug-and-play.
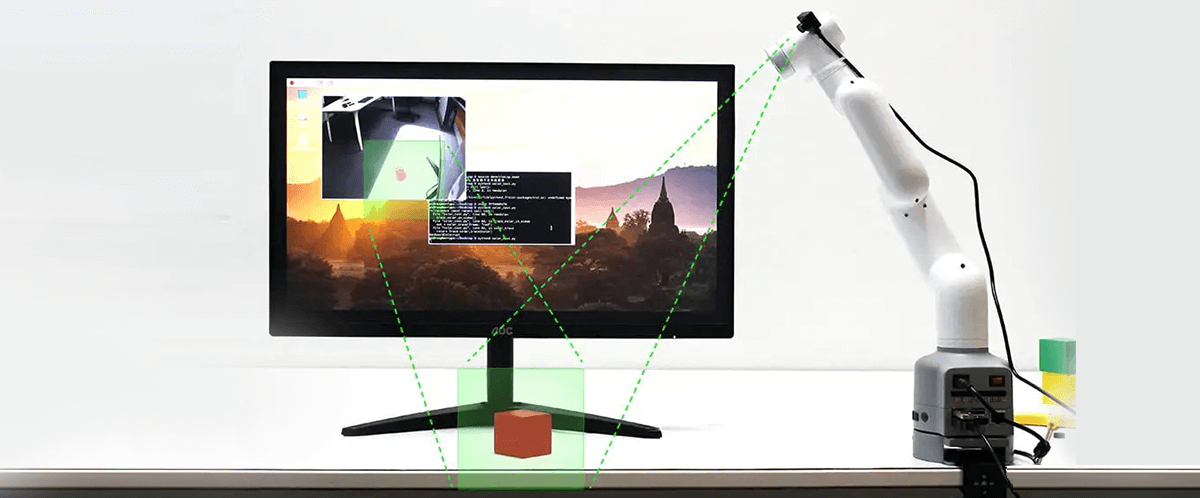
This robotic arm comes with an image recognition algorithm that can work with a variety of cameras; it can also independently match different accessories such as displays, grippers, and suction pumps for achieving more application scenarios.
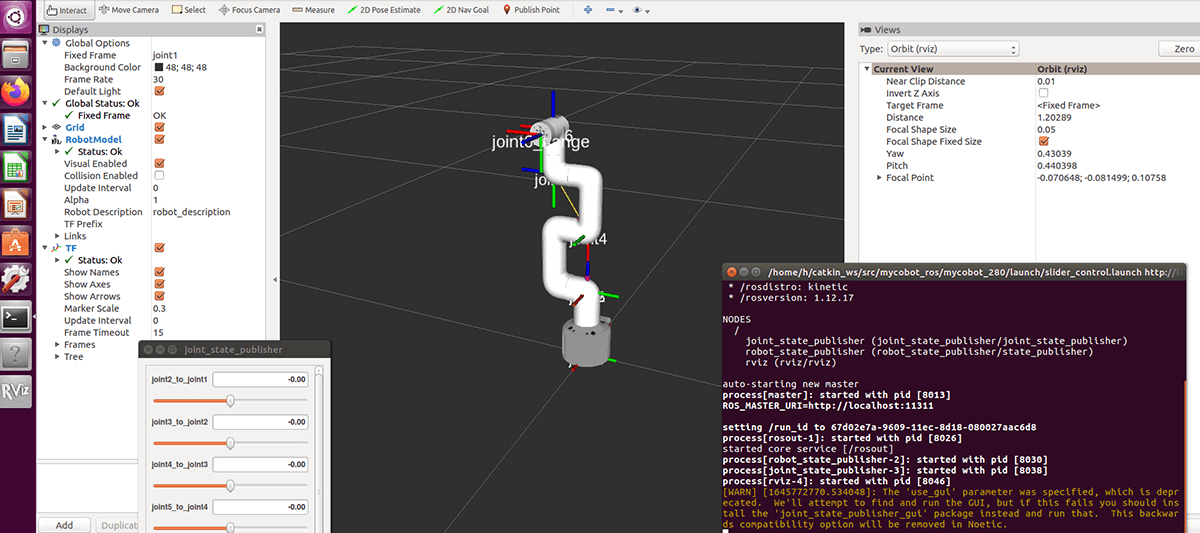
With a built-in ROS language, it’s capable to simplify 6 DOF movements under Ubuntu System.
It contains 6 high-performance servo motors, which bring a fast response, small inertia, and smooth rotation. The base and the end are equipped with Lego connectors, easier for the development of various micro-embedded equipment.
Guide for Flat Base Installation (on even and smooth surfaces):
1. Install the suction cups on the four corners of the base and tighten them.
2. Fix the bottom of the robot arm into the flat base using accessory Lego connectors.
3. Fix the four suction cups to an even and smooth surface before use. A small amount of non-conductive liquid can be added under the suction cups to fill the gap between them and the surface so as to maximize absorption efficiency.


